Pix4Dmapperv4.5.6破解版介绍
2113小编为本文中给大家分享的pix4dmapper是一款用于无人机自动航测功能的三维建模软件,集全自动、快速、专业精度为一体的无人机数据和航空影像数据处理软件,也是是目前市场上独一无二的可以让专业用户实现云计算功能,而且可以快速的生成最精准的报告,搭配免费的PIX4Dcaptureapp实现自动飞行和影像数据传输。有需要使用Pix4Dmapper的朋友快通过下面kkx分享地址带走吧!
Pix4Dmapper优势
1.专业化、简单化--PIX4D mapper让摄影测量进入全新的时代,整个过程完全自动化,并且精度更高,真正使无人机变为新一代专业测量工具。只需要简单地操作,不需专业知识,飞控手就能够处理和查看结果,并把结果发送给最终用户。2.空三、精度报告--PIX4D mapper通过软件自动空三计算原始影像外方位元素。利用PIX4UAV的技术和区域网平差技术,自动校准影像。软件自动生成精度报告,可以快速和正确地评估结果的质量。提供了详细的、定量化的自动空三、区域网平差和地面控制点的精度。
3.全自动、一键化--PIX4D mapper无需IMU,只需影像的GPS位置信息,即可全自动一键操作,不需要人为交互处理无人机数据。原生64位软件,能大大提高处理速度。自动生成正射影像并自动镶嵌及匀色,将所有数据拼接为一个大影像。影像成果可用GIS和RS软件进行显示。
4.云数据、多相机--PIX4D mapper利用自己独特的模型,可以同时处理多达10000张影像。可以处理多个不同相机拍摄的影像,可将多个数据合并成一个工程进行处理。
Pix4Dmapper特色
无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。
升空准备时间15分钟即可、操作简单、运输便利。
车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。
对起降场地的要求限制较小,可通过一段较为平整的路面实现起降,在获取航拍影像时不用考虑飞行员的飞行安全,对获取数据时的地理空域以及气象条件要求较低,能够解决人工探测无法达到的地区监测功能。
Pix4Dmapper应用领域:航测制图、灾害应急、安全执法、农林监测、水利防汛、电力巡线、海洋环境、高校科研。
Pix4Dmapper功能
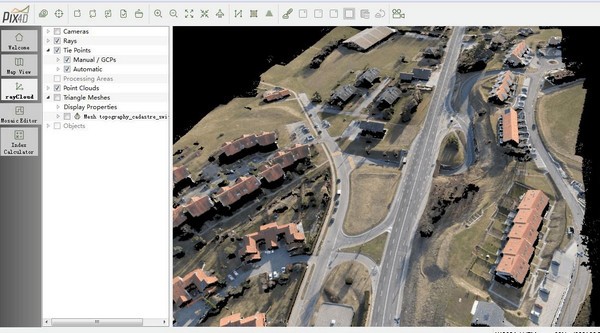
1.自动生成正射影像并自动镶嵌及匀色,将所有数据拼接为一个大影像。影像成果可用GIS和RS软件进行显示。全自动、一键化--PIX4Dmapper无需IMU,只需影像的GPS位置信息,即可全自动一键操作,不需要人为交互处理无人机数据。原生64位软件,能大大提高处理速度。
2.专业化、简单化--PIX4Dmapper让摄影测量进入全新的时代,整个过程完全自动化,只需要简单地操作,不需专业知识,飞控手就能够处理和查看结果,并把结果发送给最终用户。并且精度更高,真正使无人机变为新一代专业测量工具。
3.云数据、多相机--PIX4Dmapper利用自己独特的模型,可以同时处理多达10000张影像。可以处理多个不同相机拍摄的影像,可将多个数据合并成一个工程进行处理。
4.空三、精度报告--PIX4Dmapper通过软件自动空三计算原始影像外方位元素。提供了详细的、定量化的自动空三、区域网平差和地面控制点的精度。利用PIX4UAV的技术和区域网平差技术,自动校准影像。软件自动生成精度报告,可以快速和正确地评估结果的质量。
亮点
1、支持所输入的数据:航空(垂直和倾斜)和地面影像支持
处理各种影像,包括从任意角度,地面,无人机或常规航摄拍摄的影像
2、从视频(MP4或AVI格式)图像支持
软件自动从视频中提取帧并创建项目
任意相机(袖珍,单反,多光谱,GoPro,Tetracam,大像幅)
采用任意相机获取的影像,从小型到大型传感器(多达40MP),从消费者级别到高度专业化的相机
3、同一个项目支持多个相机
采用多个相机创建项目,一起处理数据(如近红外与红绿蓝彩色)
4、PIX4D支持标准多镜头
更稳健,更精确,更快速地处理知名厂家(Tetracam, Airinov, MicaSense,WaldoAir)的多个多波段同步相机组(阵列)数据
5、多种文件类型(.jpg,单波段或多波段Tiff)
输入多种文件格式,包括单波段和多波段影像
控制点编辑或导入(.csv,.txt)
导入或编辑控制点,提高项目的精度方,全球或任意坐标系,支持米和英尺单位从已有的坐标系统,或者您定制的本地坐标系选择
支持相机位置和外方位角元素(omega, phi, kappa)
从GPS/IMU计算优化相机位置和外方位角
6、PIX4D外部点云导入
从不同数据源导入点云,如激光扫描LiDAR,用来生成DSM和正射影像镶嵌图
7、PIX4D数据处理
快速检查处理模式:数分钟内初步处理项目,得到低分辨率结果
快速检查质量报告:现场评估影像质量和完整性
8、PIX4D处理模板
通过使用自动或定制的模板自动生成需要的成果
9、PIX4D相机自检校
优化相机内部参数.如焦距,像主点和镜头畸变.不需要外部软件或第三方的相机校正报告
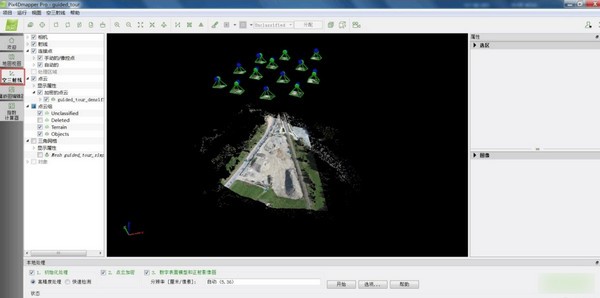
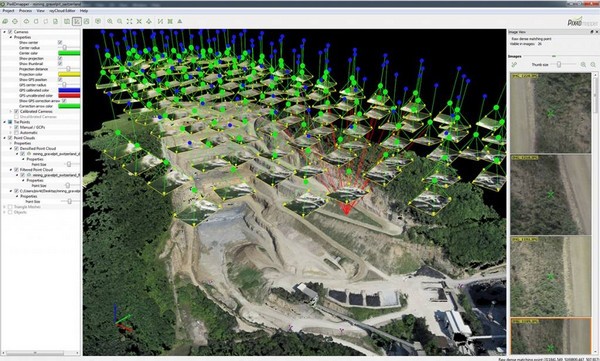
10、自动空三和光束法区域网平差
无论是否有相机位置和外方位元素都可自动处理
11、自动点云加密,半全局匹配
生产高密度和精细的三维点云,可以作生成DSM和正射影像镶嵌图
12、PIX4D点云滤波和平滑
使用预设或编辑点云滤波和平滑选项
13、自动点云分类和DTM抽取 (BETA)
自动去除点云中的建筑和植被,生成贴近地面的DTM和等高线.额外的控制,可以在rayCloud中选择和删除点来改善DTM生成
14、自动亮度和颜色校正
亮度,光照度变化自动补偿,影像颜色自动平衡
15、质量报告
评估项目的质量
16、项目合并
分部单独处理,合并为一个项目
17、项目区域定义
导入shp文件,或者在正射影像镶嵌图和点云加密/滤波绘制区域来选定生成成果的边界
18、项目分割
自动分割大项目为较小的项目,以便更高效地处理大规模数据
19、正对性的特征提取
对高分辨/高重叠率的图像能够提高处理速度
20、支持GPU
利用NVidia显卡的GPU,初始化处理的速度可提高10% - 75%。GPU还用于点云加密和半全局匹配
更新日志
*新的GCP添加界面,提高控制点添加的速度和精度
*新的rayCloud编辑器
*不仅支持无人机数据,还支持航片、倾斜摄影测量和近景摄影测量
*没有GPS数据,也可以处理
软件大小:255M软件版本:最新版
系统要求:WinAll, Win7, Win10语言:简体中文